
|

|
|
再水一贴 早日晋级 高级fans 仅供参考 老鸟请无视 第一首先看好最上边 一定要Revox 不然白调!!! 因为RD陀螺仪只是曲线控制 需要调舵机只能调Revox 才适用RD陀螺仪 之前自己查论坛没查到,正好有人问 就写一下给一些不会RD设置的车友一些参考性建议! 下面开始垃圾话环节 咋说呢 地面滑度不同 地图 路线不同 这玩意没法搞啊 因为不适用所有人 这玩意争议还大 容易被喷  参考第一图 其他照搬就行 根据场地 和地面滑度去调 车架部分也需要适应场地才行不然很难跑,车架数据,电子设备数据符合你的操作和适应场地就可以了 先来核心技能三项 就是控制尾滑和车身角度 外号爆t锁尾控制 全是大白话文翻译注释如果还理解不了那就没法了。。。 你可以理解为 如下: torque 控制车前轮扭力抓力,越大越抓 过大车会过甩 滑地10以上 pvc 地毯转抓地 10以下 torque curve 主要是控制回旋速度和弯中的车身角度, 但是不能太大 越大车在弯中越稳 电子介入高感觉,但同样有个问题 出弯收尾巴收不住还有就是会吃内线扎弯心 横滑车身角度过大等,大了翻身会慢 为啥我说翻身慢 他弯中控制车 介入高 你想翻身陀螺仪并不知道 需要让车回中 再爆t进行翻身 正常跑影响车速 比正常流程翻身不能随心的控制车! speed curve 控制手轮给的转向增益 就是正常你打30手轮 转向是30 调高以后 打30手轮可能转向是35 或者更多,数值越大 需要微操越多 数值高除非你手法高 手法稳不然就是找spin(注释掉头) 核心三项主要是控制车身漂移角度 回旋速度 前轮抓力 和车头是否跟手灵活控制 主要的影响手感项目 max power 是功率 直接影响舵机总功率总扭力 总速度 可以调高压模式但电调bec配合7.4高压模式 高压的话和低压会影响舵机速度 大快,慢小,因为RD舵机是减速舵机 ,他可以快一点但是会不好控 需要微操多一些 可以调50好控一点 电调bec6.0就可以了 高压模式慎重!!! 舵机发热!!如果不让车降温有损坏舵机风险 好比开车全油门会爆缸的 dumper震荡抑制 也可以理解弯中阻尼 越大越稳 同样操作时 在弯中操作车头反应迟钝 电子介入过高感觉 手控制反应慢的感觉 (注释:这个按官方解释 是配合敏感度调教个人没太大感觉 意思是3通道敏感度越高 震荡抑制越高有个图 个人感觉有点扯 我没试出来 见最后一图 x为敏感度 y为震荡抑制 ) dumper point 数值越高 车越稳 手操迟钝 数值低 感觉车轻快 手操灵活 可以理解为 这个功能主要是抑制舵机 抑制少了 舵机就解放了 束缚少了 当然反应快 direction 是舵机正反向 比如sx3和zx 舵机就是正装和倒装的 方向不同也可以控正反去调 其他照搬就行 不过多解释 还有不要用英文解释这些项目 你会更茫然,还有就是官方说明书写的非常非常非常难理解! 图4为 陀螺仪曲线日本官方测试车动态截图 123456档 按一下 降档 连按2下增档 由于RD没有Futaba的增益控制调节 只能通过陀螺仪敏感度来降低陀螺仪增益!! 档低 敏感度低 可以理解为减少陀螺仪介入控制 让手操多一点 结果就是累手~ 自用 有时2档 有时3档 敏感度65-86之间 追走2档 敏感度70以下 相当于减少陀螺仪增益控制,不然 很难跟前车完成同步率 漂移 如果是新手 档位3以上敏感80以上 一点点降 去适应手操慢慢增加 因为你不能一直用电子辅助去跑 辅助是不能辅助你追走的只能是追前车 或者跑图 或者当头车 而且辅助高的话,车头会被抑制,直接影响后轮 丢失抓力推力 间接性导致 你车速慢 他只是让你更好的控制住车 让你快速入门 找玩车的感觉 可以依赖 但不能完全的依赖!      |
charlesyo 发表于 2023-09-21 22:27 我说明一下我观点 先调车再调 电设 因为用电设调也能调出稳定效果 ,但是跑起来还是会感觉有点不顺, 所以先把车调到一个正常状态,通过你这个描述 我觉得是车尾灵活 调车尾 ,没有车架照片没法分析,大概思路就是 车尾速太快和车头偏抓 导致重心转移时候 车头支撑不住 , 3个方向 1是弹簧和避震 前弹簧前面你可能太软或者前摆臂孔位选择 和避震斜度过于前避震偏立直状态 需要一点点斜度 导致车头过于抓地 而屁股又太抛和滑导致spin 避震是否顺滑 2 是先调车尾 增加一些camberlink角度 让车尾更抓一点增加侧向支撑 换弹簧别搞太硬 3是 观察一下你的车屁股平行状态后上拉杆状态和接杯孔位选择 ,不知道你选择什么胎皮? 但是你需要看一下你俩面后轮倾角状态 和后轮接地面是否是内侧 根据地面决定你得后轮倾角 你这个就是车头和车尾不匹配导致的 前轮接杯增加垫片 适当增加前轮滚动也可以试试 弹簧我自己用的都是RD的 轨道车这个说法 其实是更多的电子辅助介入的问题 涉及到陀螺仪底层程序逻辑 ,对新手来说 更好上手 老人来说不那么累 车架和电子设备调好了配合 车更加稳定,仅个人见解说的不对 请轻喷 还有有些人就喜欢灵活的车这样追走更好跟进 |
charlesyo 发表于 2023-09-21 22:27 跟Yokomo 03d v4这类转向套最大的不同 是更多的设置,多了 尾滑角度控制 和限滑,也叫锁尾 正常陀螺仪和舵机是没有这个功能的, 就是通过设置 改变车尾滑行角度 ,但是设置过多的辅助介入数据,导致舵机抑制车头 控制尾滑角度 会直接导致车速变慢影响 这点Futaba 550套没有这个缺陷 这俩套在同一台车上车架数据不变测试过了 ,RD套可以理解为减配版550 RD套就需要取舍 还有个缺陷就是你领跑可以标准走线非常稳 当你后车追走 总感觉慢前车一拍,需要降低陀螺仪档位或者降低陀螺仪敏感度带来更快速的灵活 但是缺点出来了降低敏感度会减少辅助抑制 车会没有之前稳定,Futaba套 就可以单独设置陀螺仪的增益或陀螺仪混控来改善这个 这么说你理解了么 附带一张最新版 滑地版本我的参数仅供参考! 时代和科技都在进步 就好像现在各种自动驾驶  让玩车变得简单 让玩车变得简单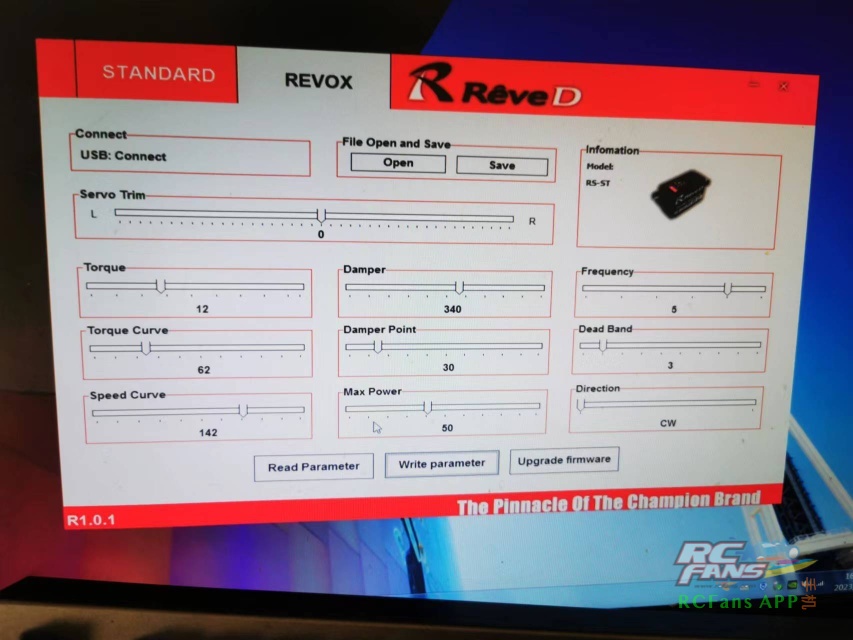 |
心境 发表于 2023-09-22 00:37 大佬说得很详细,学到了。我的车是rdx,看你之前也发了rdx的帖子,能否加个wx,后面还想请教请教  |
心境 发表于 2023-09-22 00:59 reved的陀螺仪是必须跟他家的舵机配合使用吗?我看车场有人用reved陀螺仪+afrc舵机的 |
charlesyo 发表于 2023-09-22 09:46 我也是菜鸡 ,互相交流 私聊你了 |
广告投放|联系我们|手机|投稿|Archiver|About us|Advertise|遥控迷模型网|RCFans ( 粤ICP备10210518号-1 )
版权所有 RCFans.com © 2003-2016




